





Буферні та драйверні мікросхеми використовуються для захисту сигналів, підвищення сили приводу та керування навантаженням в електронних схемах. Буфер головним чином покращує ізоляцію сигналу, розгортання та цілісність сигналу, тоді як драйвер забезпечує вищий струм або напругу для реле, світлодіодів, MOSFET, моторів, довгих доріжок або ліній зв'язку. У цій статті порівнюється буферні та драйверні ІС, їхні типи, застосування, диференціальне використання комунікації та коефіцієнти вибору.

Що таке буфер/драйвер?
Буфер/драйвер — це електронна схема, яка використовується для передачі сигналу з однієї частини системи в іншу без ослаблення, затримки або перевантаження вихідної схеми. Він допомагає підтримувати цілісність сигналу, коли сигнали проходять через довгі платові доріжки, кабелі, шини або кілька підключених пристроїв.
Буфер переважно ізолює один каскад схеми від іншого та зменшує ефекти навантаження. Драйвер збільшує струм або напругу сигналу, тому малопотужні керуючі схеми можуть приводити в дію більші навантаження, швидші навантаження, світлодіоди, реле, MOSFET, двигуни або лінії зв'язку. Хоча буфери та драйвери відрізняються за функціями, багато ІС поєднують обидві функції в одному пристрої.
Наприклад, контакт мікроконтролера не повинен безпосередньо приводити в дію мотор, реле чи довгу сигнальну лінію. Драйвер або буфер відповідає за електричне навантаження, захищаючи контролер і підтримуючи стабільність сигналу.
| Пункт | Buffer | Водій |
|---|---|---|
| Головна мета | Ізолює та зберігає якість сигналу | Збільшує можливість струму або напруги |
| Типове навантаження | Логічні входи, шини, тактові лінії | MOSFET затвори, світлодіоди, реле, мотори, довгі кабелі |
| Вихідна сила | Помірний | Вище |
| Головне питання | Завантаження, розподіл, цілісність сигналу | Струм, тепло, швидкість перемикання, захист |
| Поширені приклади | 74HC125, 74HC244, серія SN74LVC | ULN2003, MOSFET драйвери, RS-485, моторні драйвери |
Як працює буфер/драйвер
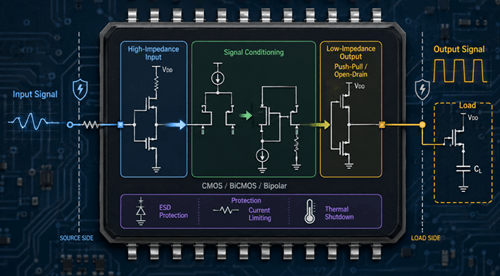
Буфер/драйвер працює, приймаючи вхідний сигнал і відтворюючи його на виході з кращою міцністю, стабільністю та здатністю до навантаження. Всередині пристрою транзисторні ступені обробляють сигнал за допомогою CMOS, BiCMOS або біполярної технології залежно від необхідної швидкості, напруги та струму. Вхідна сторона зазвичай має високий імпеданс, тобто споживає дуже мало струму від джерельного кола. Це запобігає падінню напруги, зменшує спотворення форми сигналу та зберігає стабільність початкового сигналу.
Після отримання сигналу буфер/драйвер його налаштовує і передає на вихідний каскад, призначений для обробки навантаження. Цей вихідний ступінь зазвичай має низький імпеданс і може використовувати структуру push-pull або відкритий дренаж. Вихід push-pull може отримувати і поглинати струм, що покращує розподіл, час підйому, час падіння та продуктивність перемикання. У потужніших драйверних схемах вихідний каскадаль також може забезпечувати високий піковий струм для ємнісних навантажень, таких як MOSFET або IGBT-затвори.
Буфер/драйвер також ізолює джерело від навантаження, тому зміни ємності, потреби струму чи електричного шуму безпосередньо не порушують початковий сигнал. Багато сучасних пристроїв мають захисні функції, такі як захист від ESD, обмеження струму та термічне вимкнення для підвищення надійності. У високошвидкісних системах продуктивність залежить від затримки поширення, часу підйому та часу падіння, оскільки вони визначають, наскільки швидко і точно сигнал може переміщатися від входу до виходу.
Типи буферних і драйверних схем
Різні буферні та драйверні схеми розроблені для конкретних рівнів напруги, швидкостей перемикання, умов сигналу та навантаження. Деякі з них використовуються для очищення та посилення цифрових логічних сигналів, інші забезпечують струм, необхідний для керування шинами, світлодіодами, двигунами, силовими транзисторами або високошвидкісними каналами зв'язку.
| Тип | Головна функція | Типове використання | Приклади пристроїв |
|---|---|---|---|
| Логічний буфер | Посилює або ізолює цифрові логічні сигнали | Виходи MCU, інтерфейси FPGA, тактові лінії, цифрові шини | 74HC125, 74HC244, серія SN74LVC |
| Триштатний буфер | Додає вихідні стани ВИСОКОГО, НИЗЬКОГО та Високого Опору | Спільні шини, системи пам'яті, мікропроцесорні інтерфейси | 74HC125, 74HC244 |
| Водій автобуса | Керує більшими цифровими шинами або кількома логічними входами | Шини процесорів, інтерфейси пам'яті, маршрутизація сигналу FPGA | 74LVC245, 74HC245 |
| Буфер зсуву рівнів | Передає сигнали між різними логічними напругами | Системи змішаної напруги 1.8V, 3.3V і 5V | Серія TXB/TXS, серія SN74LVC |
| Вантажний двигун | Дозволяє логічним схемам керувати навантаженнями з більшим струмом | Реле, світлодіоди, соленоїди, маленькі мотори | ULN2003, ULN2803 |
| Водій на воротах | Приводи MOSFET, IGBT, GaN або SiC перемикачі живлення | Блоки живлення, моторні приводи, інвертори, електромобілі | UCC27511, IR2110, ізольовані драйвери затворів |
| Драйвер диференціала | Надсилає сигнали через шумні або міжміські лінії | RS-485, CAN, LVDS, Ethernet, промислові мережі | MAX485, серія SN65HVD |
Цифрові логічні буфери
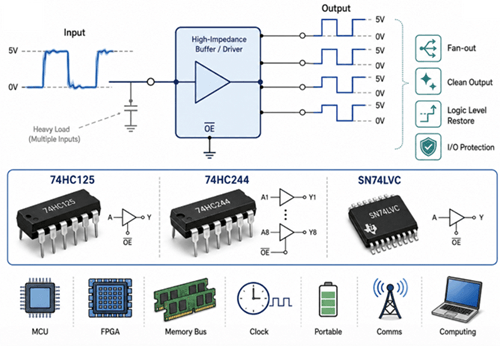
Цифрові логічні буфери відтворюють вхідний сигнал на виході, зменшуючи електричне навантаження на вихідну схему. Вони корисні, коли один MCU, процесор або FPGA-контакт повинен керувати кількома логічними входами, довгими доріжками друкованих плат або тактовими лініями.
Логічний буфер допомагає підтримувати дійсні рівні ВИСОКОЇ та НИЗЬКОЇ напруги, покращує розширення напруги та зменшує ризик повільних країв або нестабільного перемикання. Сучасні низьковольтні логічні сімейства також корисні в компактних системах, де потрібна робота 1,8В, 2,5В або 3,3В.
Триштатні буфери та драйвери шин
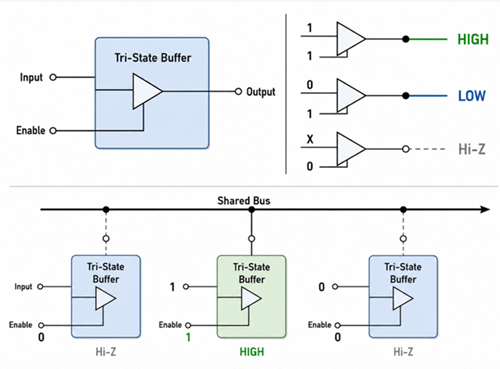
Тристанні буфери забезпечують три вихідні стани: логічний ВИСОКИЙ, логічний НИЗЬКИЙ і високий імпеданс. Стан високого опору відключає вихід від шини, дозволяючи кільком пристроям користуватися однією лінією сигналу без конфлікту між собою.
Водії автобусів використовуються, коли сигнал має керувати багатьма входами або проходити по ширшій цифровій шині. Вони поширені в системах пам'яті, мікропроцесорних інтерфейсах, платах FPGA та лініях передачі даних, де потужність сигналу та таймінг мають залишатися стабільними.
Буфери зсуву рівнів
Буфери зсуву рівня використовуються, коли дві схеми працюють при різних логічних напругах. Наприклад, сенсор на 1,8 В може потребувати зв'язку з 3,3 В МКМ, або 3,3 В контролер — з 5 В периферійним пристроєм.
Без належного зсуву рівня сигнал може не відповідати вхідному порогу приймаючого пристрою, або сторона з вищою напругою може пошкодити схему з нижчою напругою. Буфер зсуву рівня допомагає підтримувати безпечний і правильний логічний зв'язок між пристроями змішаної напруги.
Завантажені драйверні ІС
Інтегральні схеми драйвера навантаження дозволяють низькопотужним логічним схемам керувати навантаженнями з більшим струмом. Контакт мікроконтролера не може безпосередньо керувати реле, соленоїдом, світлодіодом високої яскравості або малим мотором, оскільки ці навантаження потребують більшого струму, ніж може безпечно забезпечити контакт.
Пристрої, такі як ULN2003 і ULN2803, використовують ступені транзисторного драйвера для обробки більшого струму навантаження. Вони корисні для релейних плат, керування світлодіодами, схемами соленоїдного приводу, фазами крокових двигунів та простими автоматизованими системами.
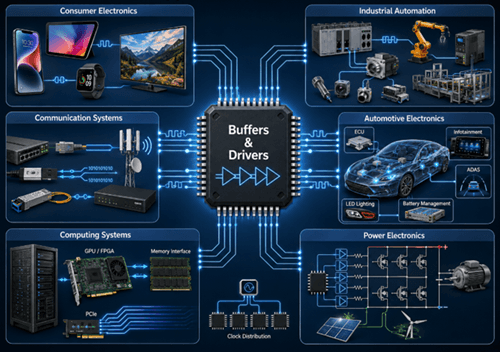
Поширені застосування буферів і драйверів
Буфери та драйвери використовуються, коли сигнал потребує більшої потужності приводу, кращої ізоляції, чистішого таймінгу або безпечнішого контролю навантаження. Різні застосування використовують різні типи драйверів залежно від швидкості сигналу, струму навантаження, рівня напруги та шумового середовища.
| Сфера застосування | Типовий буфер або драйвер | Чому це використовується |
|---|---|---|
| Мікроконтролер і схеми GPIO | Логічний буфер, буфер зсуву рівнів | Захищає контакти MCU, покращує розпуск і відповідає різним рівням логічної напруги |
| FPGA та інтерфейси процесорів | Логічний буфер, драйвер шини, буфер тактового сигналу | Підтримує точність таймінгу та зменшує навантаження на високошвидкісні цифрові лінії |
| Шини пам'яті та даних | Триштатний буфер, драйвер шини | Дозволяє спільне керування шиною та запобігає конфлікту сигналів між пристроями |
| Довгі доріжки та кабелі для друкованих плат | Лінійний драйвер, драйвер диференціала | Посилює сигнали та знижує чутливість до шуму на відстані |
| RS-485, CAN та промислові мережі | Драйвер диференціалу, трансивер | Покращує відхилення шуму та підтримує надійний зв'язок у суворих умовах |
| Керування світлодіодами та реле | Драйвер навантаження, масив транзисторів | Дозволяє низькопотужним логічним сигналам керувати навантаженнями з більшим струмом |
| MOSFET та IGBT-комутація | Водій на воротах | Забезпечує піковий струм для швидкого перемикання та менших втрат потужності |
| Керування мотором і силова електроніка | Водій мотора, водій на воротах | Контролює потік струму, швидкість перемикання, крутний момент і функції захисту |
| Автомобільна електроніка | Водій CAN, драйвер вентиляції, вантажний драйвер | Підтримує шумні середовища, розподілене керування та навантаження з високими струмами |
| Джерела живлення та інвертори | MOSFET, IGBT, GaN або драйвер затворів SiC | Покращує ефективність перемикання, теплові характеристики та керування силовими ступенями |
Драйвери комунікації та диференціальних факторів
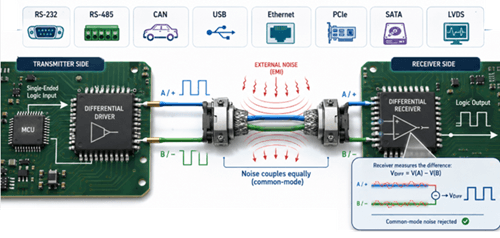
Драйвери зв'язку та диференціалу використовуються, коли сигнали мають проходити через кабелі, роз'єми, довгі доріжки друкованих плат або електрично шумні середовища. Замість того, щоб передавати сигнал у вигляді однієї напруги, пов'язаної з землею, багато систем використовують диференціальну сигналізацію, де приймач вимірює різницю напруги між двома комплементарними лініями сигналу.
Цей метод покращує відштовхування шуму, зменшує загальні перешкоди та підтримує стабільну передачу даних на великі відстані або на вищих швидкостях.
Чому диференціальні драйвери покращують комунікацію
При односторонній сигналізації шум на землі або сигнальній лінії може безпосередньо порушувати прийняту напругу. У диференціальній сигналізації зовнішній шум часто поєднується з обома лініями подібним способом. Оскільки приймач зчитує різницю між двома лініями, більша частина цього поширеного шуму відкидається. Саме тому драйвери диференціалу широко використовуються в промисловій, автомобільної, обчислювальній та комунікаційній системах.
| Інтерфейс | Типовий тип гонщика | Головна перевага |
|---|---|---|
| RS-485 | Драйвер диференціальної лінії | Міжміський та шумостійкий промисловий зв'язок |
| CAN | Диференціальний трансивер | Надійна комунікація транспортних засобів і промислових мереж |
| LVDS | Низьковольтний диференціальний драйвер | Високошвидкісна, низькошумна сигналізація на рівні плати |
| USB | Диференціальний сигнальний драйвер | Надійна послідовна передача даних |
| Ethernet | Диференціальна фізична сигналізація | Довгий кабельний зв'язок і мережеве підключення |
| PCIe / SATA | Драйвери високошвидкісних диференціалів | Висока швидкість передачі даних і контрольована цілісність сигналу |
Як обрати буфер або драйверний IC
Вибір правильного буфера або драйвера ІС залежить від джерела сигналу, типу навантаження, рівня напруги, швидкості перемикання, вихідного струму та середовища плати. Логічний буфер зазвичай використовується для захисту та посилення сигналів, тоді як драйвер застосовується, коли схема має керувати більшими навантаженнями, довшими трасами, кабелями, MOSFET-затворами, реле, світлодіодами або моторами.
Як обрати правильний буфер або драйверну ІС
| Потреба в дизайні | Кращий вибір | Що перевірити |
|---|---|---|
| Один сигнал керує кількома логічними входами | Логічний буфер | Вихід вентилятора, вхідна ємність, вихідний струм |
| Декілька пристроїв мають спільну шину | Триштатний буфер | Увімкніть керування, високий імпеданс, ризик конфлікту шини |
| MCU або FPGA підключаються до іншого рівня напруги | Буфер зсуву рівнів | Діапазон вхідної/вихідної напруги, логічні пороги |
| Сигнал проходить через довгу доріжку друкованої плати | Водій автобуса або водій лінії | Сила двигуна, затримка поширення, термінація |
| Сигнал проходить через кабель або шумне середовище | Драйвер диференціала | RS-485, CAN, LVDS, шумостійкість, довжина кабелю |
| Логічний контакт керує реле, світлодіодом або соленоїдом | Вантажний двигун | Вихідний струм, затискач діода, тепловідведення |
| PWM-сигнал керує MOSFET або IGBT | Водій на воротах | Піковий струм, напруга затвора, швидкість перемикання |
| Високошвидкісний такт або сигнал даних потребує чіткого таймінгу | Високошвидкісний буфер | Зміщення, тремтіння, час підйому/падіння, якість верстки |
Для простих логічних сигналів спочатку перевірте сумісність напруги та розширення напруги. Для навантаження з високим струмом або високою швидкістю перевіряйте вихідний струм, тепловий рейтинг, затримку поширення, швидкість перемикання на кромках та вимоги до компонування.
Усунення несправностей
| Поширена проблема | Причина | Ефект | Рішення |
|---|---|---|---|
| Дзвін сигналу та відбиття | Неправильне завершення або невідповідність імпедансу | Спотворення сигналу та помилки зв'язку | Використовуйте правильну термінацію та маршрутизацію з контрольованим опором |
| Перегрів драйвера | Надлишковий струм, погане охолодження або недостатня характеристика пакета | Термічне вимкнення або відмова пристрою | Зменшіть струм навантаження, покращте відведення тепла або оберіть драйвера з вищим рейтингом |
| Помилки у таймінгу | Надмірна затримка поширення, зсув або поганий маршрутизатор | Помилки синхронізації та помилки даних | Використовуйте швидші драйвери, узгоджуйте довжину доріжок і оптимізуйте маршрутизацію |
| Шум і EMI | Погане заземлення, швидкі граничні швидкості або слабке від'єднання | Пошкодження сигналу та перешкоди | Покращення заземлення, екранування, роз'єднання та розділення планування |
Поширені запитання [FAQ]
Q1. Як розсіяння впливає на буфер або вибір драйвера?
Високий розподіл розгортання збільшує ємність навантаження та поточне навантаження. Логічний буфер допомагає одному сигналу керувати кількома входами без слабких логічних рівнів, повільних країв або нестабільності часу.
Q2. Коли слід використовувати триштатний буфер замість стандартного?
Використовуйте тристановий буфер, коли кілька пристроїв ділять одну шину. Його стан високого опору відключає вихід і не дозволяє одночасно працювати двом пристроями по лінії.
Q3. Чому довгі доріжки або кабелі часто потребують лінійних або диференціальних драйверів?
Довгі сигнальні шляхи додають ємність, шум, невідповідність імпедансу та втрати сигналу. Драйвери лінії посилюють сигнал, а диференціальні драйвери покращують відштовхування шуму на відстані.
Q4. Які параметри найважливіші при виборі буфера або драйверної ІС?
Перевірте напругу живлення, логічні пороги, вихідний струм, затримку поширення, час підйому/спаду, структуру виходу, рейтинг корпусу, теплові ліміти та особливості захисту.
Q5. Чому неправильний драйвер може спричинити перегрів або помилки в таймінгу?
Драйвер із недостатнім струмом, низьким тепловим запасом або надмірною затримкою поширення може перегрітися, перемикатися занадто повільно, спотворювати краї або спричиняти помилки синхронізації у високошвидкісних схемах.










